-
 Acura
Acura
-
 Alfa Romeo
Alfa Romeo
-
 Aston Martin
Aston Martin
-
 Audi
Audi
-
 Bentley
Bentley
-
 BMW
BMW
-
 Brabus
Brabus
-
 Bugatti
Bugatti
-
 Buick
Buick
-
 Cadillac
Cadillac
-
 Chery
Chery
-
 Chevrolet
Chevrolet
-
 Chrysler
Chrysler
-
 Citroen
Citroen
-
 Dacia
Dacia
-
 Daewoo
Daewoo
-
 Daihatsu
Daihatsu
-
 Datsun
Datsun
-
 Dodge
Dodge
-
 Ferrari
Ferrari
-
 Fiat
Fiat
-
 Ford
Ford
-
 Geely
Geely
-
 Great Wall
Great Wall
-
 Haval
Haval
-
 Honda
Honda
-
 Hummer
Hummer
-
 Hyundai
Hyundai
-
 Infiniti
Infiniti
-
 Jaguar
Jaguar
-
 Jeep
Jeep
-
 Kia
Kia
-
 Lamborghini
Lamborghini
-
 Land Rover
Land Rover
-
 Lexus
Lexus
-
 Lincoln
Lincoln
-
 Maserati
Maserati
-
 Maybach
Maybach
-
 Mazda
Mazda
-
 Mercedes-Benz
Mercedes-Benz
-
 MINI
MINI
-
 Mitsubishi
Mitsubishi
-
 Nissan
Nissan
-
 Opel
Opel
-
 Peugeot
Peugeot
-
 Porsche
Porsche
-
 Renault
Renault
-
 Rolls-Royce
Rolls-Royce
-
 Saab
Saab
-
 SEAT
SEAT
-
 Skoda
Skoda
-
 Smart
Smart
-
 SsangYong
SsangYong
-
 Subaru
Subaru
-
 Suzuki
Suzuki
-
 Tesla
Tesla
-
 Toyota
Toyota
-
 Volkswagen
Volkswagen
-
 Volvo
Volvo
-
 ВАЗ (Lada)
ВАЗ (Lada)
-
 ЗАЗ
ЗАЗ
-
 ЗИЛ
ЗИЛ
-
 КамАЗ
КамАЗ
-
 ЛуАЗ
ЛуАЗ
-
 Москвич
Москвич
-
 УАЗ
УАЗ
Прежде всего, стоит запомнить, что сам по себе полный привод делится всего на три вида: подключаемый вручную (part-time), постоянный (full-time) и подключаемый автоматически (torque on-demand).
Полный привод, подключаемый вручную (part-time)
Система типа part-time сейчас является уже устаревшим типом полного привода, но в определенных условиях до сих пор весьма эффективным. Принцип работы системы прост: в обычном режиме автомобиль моноприводный, а одна из осей (чаще всего передняя) жестко подключается вручную рычагом или кнопкой. Почему жестко? Потому что при активации полного привода все колеса вращаются с одинаковой скоростью (только 50:50). По этой причине включать полный привод рекомендуется только на бездорожье или скользкой дороге (песок, снег, лед и т.д.). На твердом покрытии в поворотах машина просто “не захочет” поворачивать: передние колеса автомобиля проходят больший путь, чем задние, а тяга между осями не перераспределяется (межосевого дифференциала нет). В итоге колеса будут скользить, а трансмиссия испытывать высокую нагрузку. Именно поэтому полный привод, подключаемый вручную, чаще всего называют “временным”. Такой тип трансмиссии устанавливается на Ford Ranger, Isuzu D-max, UAZ Patriot, Suzuki Jimni и др.

Постоянный полный привод (full-time)
Так вот, чтобы тяга на все колеса поступала постоянно и не мешала машине поворачивать, в современной полноприводной трансмиссии имеется межосевой самоблокирующиеся дифференциал (вискомуфта или Torsen). А на некоторых машинах с таким типом полного привода зачастую устанавливают еще и межколесные блокировки. Так называемый постоянный полный привод чаще всего можно встретить на автомобилях повышенной проходимости (Toyota Land Cruiser 200, Land Rover Defender, Lada 4x4 и др.).

Также в качестве подтипа постоянного полного привода можно отметить некий селективный вид, который сочетает преимущества систем part-time и full-time. В частности, подобная трансмиссия стоит на Jeep Grand Cherokee (SelecTrac) или Mitsubishi Pajero (Super Select 4wd). Полный привод у этих автомобилей постоянный с блокировкой межосевого дифференциала (на некоторых машинах есть и межколесные блокировки), а главное, с возможностью отключения переднего моста.

Полный привод, подключаемый автоматический (torque on-demand)
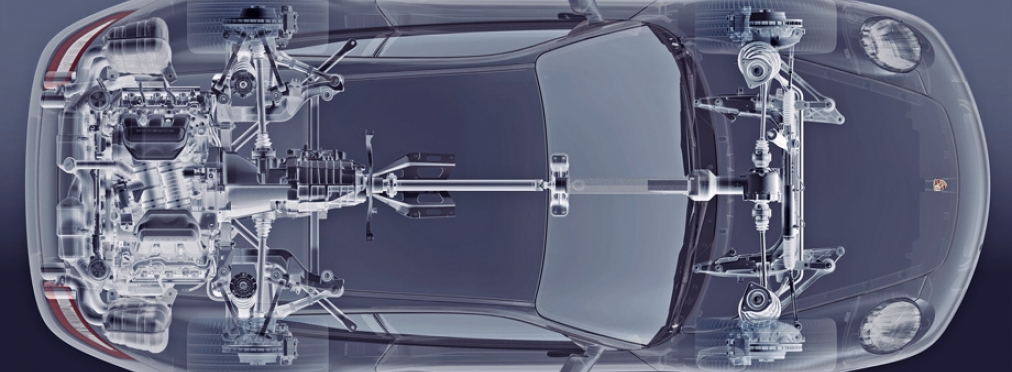
Дальнейшее развитие систем полного привода соединило механическую начинку полного привода с электроникой, которая, получая сигналы от блока ABS (скорость вращения каждого колеса, угол поворота руля, вращение автомобиля относительно вертикальной оси и т.д.), заведует перераспределением крутящего момента между передней и задней осями, а в некоторых автомобилях - и между отдельными колесами.

Полный привод, подключаемый автоматически, еще называют “тягой по требованию”. Работает такая система по следующему принципу: в обычном режиме машина моноприводная, но при пробуксовке колес, резком ускорении или торможении автоматически подключается вторая ось. В самой распространенной схеме за это отвечает специальная муфта с многодисковым сцеплением, например Haldex на автомобилях концерна Volkswagen Group. Однако существуют и более навороченные системы электронно–управляемого полного привода, в которых все гораздо сложнее.

К примеру, на автомобили Acura ставится система SH-AWD, в которой тяга на вторичную заднюю ось поступает через гипоидную передачу и задние полуоси, приводящиеся в движение отдельно при помощи пакетов фрикционов. Такая схема позволяет не только перераспределять крутящий момент между передними и задними колесами (при зажатых фрикционах назад может поступать до 70%), но и контролировать тягу между задними колесами для улучшения устойчивости и управляемости. Не менее сложный полный привод и у “заряженного” Mitsubishi Lancer Evo X, у которого целых три дифференциала: центральный с электронной блокировкой, передний “самоблок” и активный задний “дифф” Super AYC, перебрасывающий тягу между задними колесами.
При этом важно понимать, что современные системы на основе электронно–управляемых узлов относятся, по сути, к постоянному полному приводу, поскольку в большинстве систем имеется так называемый преднатяг (на вторичную ось перетекает до 10% крутящего момента). Это необходимо для того, чтобы электроника могла моментально перераспределить крутящий момент.
Источник: Авторамблер